
Page 45 - Sinumetech1
P. 45
Plusieurs déf s sont à rele-
ver. Le premier est de décou-
per la tige en articulations
mouvantes. Pour que la
f eur puisse être entraînée
par le câble, il est important
Simulation du fonctionnement
de pouvoir appliquer un
couple maximal, d’où l’éloi-
gnement du canal du câble
de l’axe des articulations.
Dans un second temps, pour
s’assurer qu’une fois verti-
cale la f eur retombe sous
l’ef et de son poids, on peut
incliner légèrement la f eur
en rajoutant de la matière
sur les articulations. Enf n,
le diamètre de la roue du
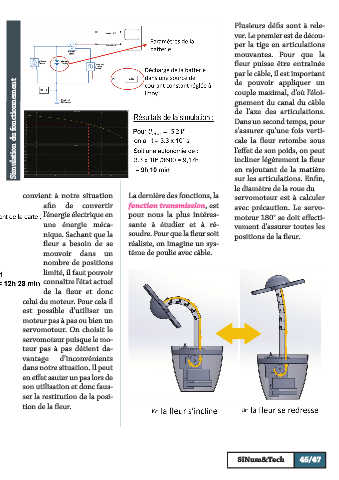
convient à notre situation La dernière des fonctions, la servomoteur est à calculer
af n de convertir fonction transmission, est avec précaution. Le servo-
l’énergie électrique en pour nous la plus intéres- moteur 180° se doit ef ecti-
une énergie méca- sante à étudier et à ré- vement d’assurer toutes les
nique. Sachant que la soudre. Pour que la f eur soit positions de la f eur.
f eur a besoin de se réaliste, on imagine un sys-
mouvoir dans un tème de poulie avec câble.
nombre de positions
limité, il faut pouvoir
connaître l’état actuel
de la f eur et donc
celui du moteur. Pour cela il
est possible d’utiliser un
moteur pas à pas ou bien un
servomoteur. On choisit le
servomoteur puisque le mo-
teur pas à pas détient da-
vantage d’inconvénients
dans notre situation. Il peut
en ef et sauter un pas lors de
son utilisation et donc faus-
ser la restitution de la posi-
tion de la f eur.
SiNum&Tech 45/47